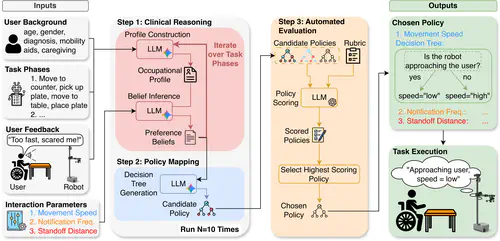
We developed an LLM-based framework that personalizes assistive robots using natural language feedback, significantly reducing the physical and cognitive fatigue associated with traditional methods. Grounded in clinical reasoning, the system translates unstructured user input into safe, deterministic control policies for individuals with profound motor impairments.